こんにちは。Horyです。
単振動についての解説が前回の記事で終わりました。
今回は直交座標と極座標の違いを簡単に解説するとともに運動方程式をどのように変換するかを解説します。
非常に重要な内容になりますので必ず理解していただきたいです。
また、直交座標と極座標の違いについては数学の記事でも解説していますので必要なら以下の記事も読んでおくことをお勧めします。
今回も頑張りましょう。
直交座標と極座標
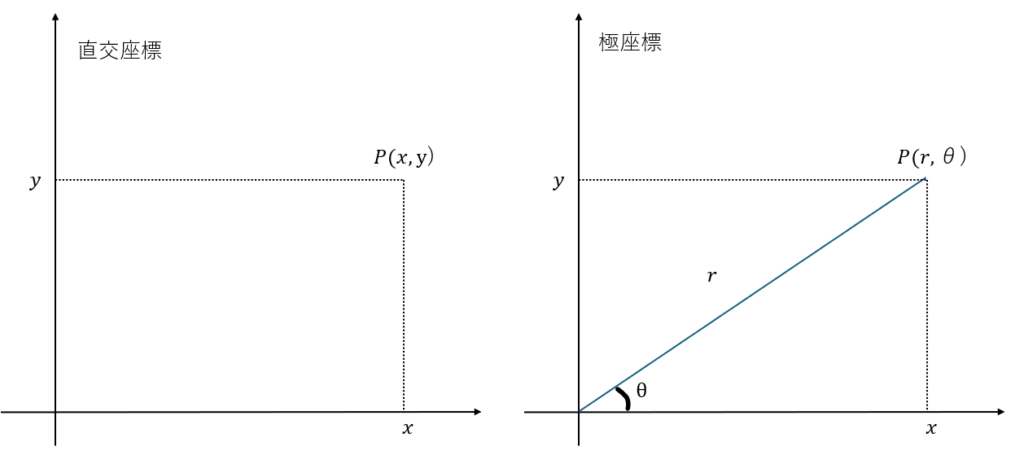
直交座標と極座標について簡単に解説します。
- 直交座標・・・原点(基準点)を決めて物体の位置をxとyの座標成分で表す
- 極座標・・・原点(基準点)を決めて物体の位置を原点からの距離と角度で表す。
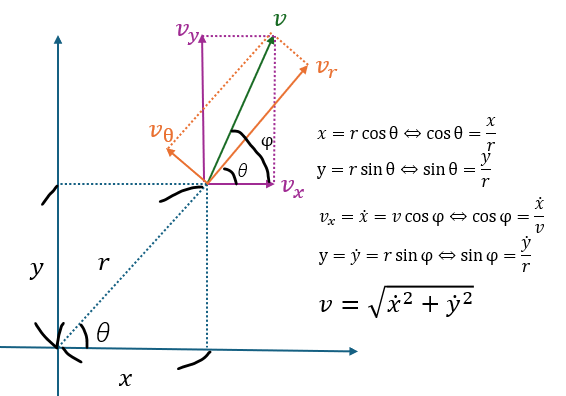
以下に図を示します。
ここで、物理における極座標で出てくる文字の意味を解説します。
- 原点O・・・極
- ベクトルOP・・・動径方向
- OPの距離r・・・動径距離
- x軸・・・始線
- 角度θ・・・偏角=動径方向と始線のなす角度
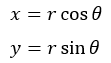
上の図では極座標の始線と直交座標のx軸が一致しています。
この時に限り、直交座標は以下に示すような極座標に変換できます。
さて、高校物理における円運動の最大の問題点を話します。
高校物理では円運動の運動方程式は極座標で表示されています。そして、説明の際に「極座標で表示されている」という説明はほとんどしません。これが最大の問題点です。
つまり、円運動の運動方程式は直交座標系でも極座標系でも記述することができるのにこれについての説明を一切しないのです。
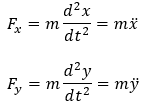
力の極座標変換
直交座標と極座標について力は以下のように分けることができます。
ただし、円運動しているわけではないので「動径r」も時間変化するとします。
- 極座標
- 動径方向の力・・・Fr
- 接線方向の力・・・Fθ
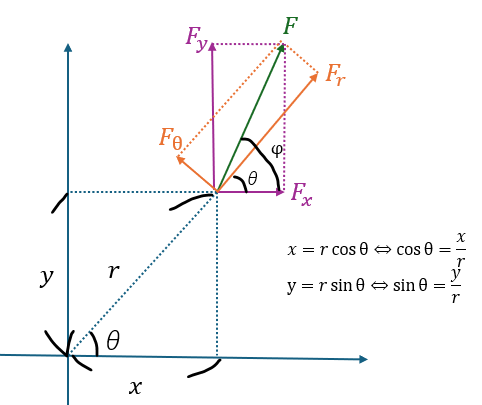
極座標の動径方向と接線方向の力を直交座標系の力で表してみます。
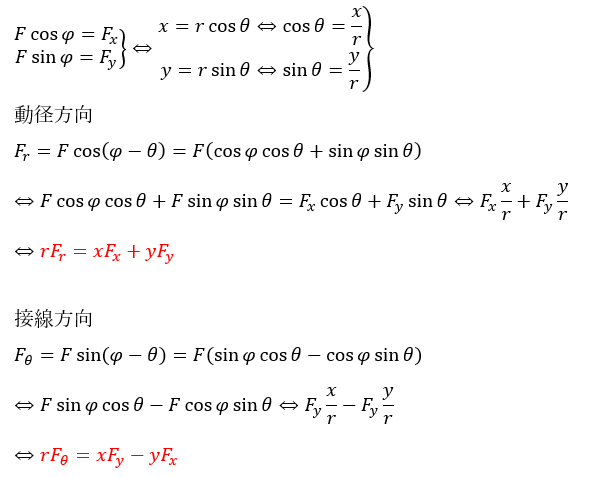
動径方向・接線方向における運動方程式
動径方向と接線方向における運動方程式を記述したいと思います。
以下の項目に分けて話そうと思います。
- 事前準備と数学的知識
- 動径方向の運動方程式
- 接線方向の運動方程式
事前準備と数学的知識
ここで、見やすさのために関数の時間微分について以下のように書きたいと思います。
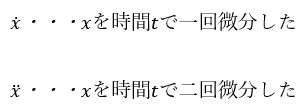
また、よく勘違いする人がいますが、θは定数ではありません。時間に関係する関数です。そのため微分ができます(これに注意してください)。

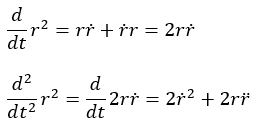
上の微分は合成関数の微分を用いています。以下の記事を読んでおいてください。
また、rは時間に依存する関数であるとすると・・・
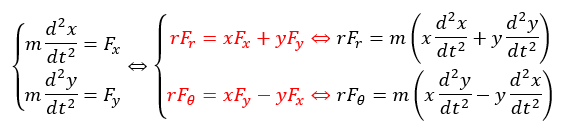
動径方向の運動方程式
これを用いて動径方向と接線方向の力を記述します。
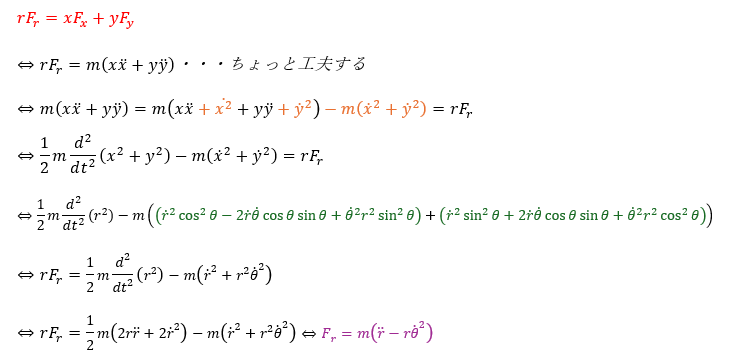
上の式の紫色で書いた部分が動径方向の運動方程式です。
接線方向の運動方程式
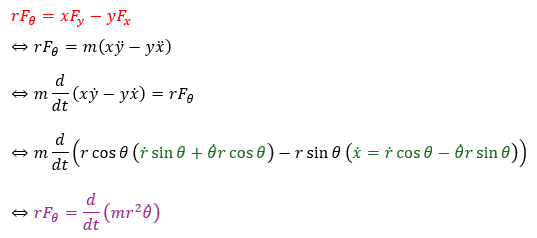
上の式の紫色で書いた部分が接線方向の運動方程式です。
極座標での運動方程式 まとめ
極座標での運動方程式をまとめます
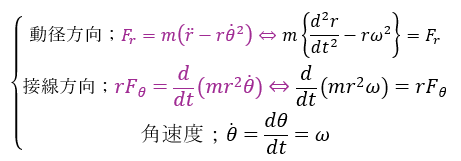
このように記述することができます。
この角速度とは角度が時間によってどのように変化するかというのを意味します。
(角度を時間で一回微分したもの)
ここで、接線方向の速度vθを導出してみます。速度に関しても力と同様にベクトルで以下のように記述することが可能です。
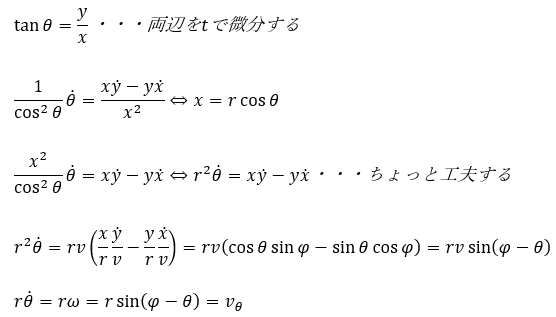
以上から接線方向の運動方程式は接線方向の速度を用いて以下のように記述ができます。

円運動について・・・
ここで、円運動について考えます。
まず、円運動では極座標で考えたときに動径距離rが一定になります。 だから、動径方向での運動方程式は以下のように描くことができます。
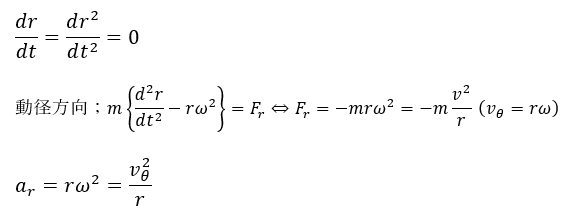
このarというのが静止している観測者から見た(慣性系で考えた)動径方向の加速度と呼ばれているモノであり、動径方向の加速度の拘束条件です。
拘束条件の記事はこちらにありますので読んでおいてください。
円運動での運動方程式
円運動の運動方程式について・・・
これについては今までに解説した記事だけでは説明できないです。
これに関しては別の記事で説明しますので円運動の運動方程式や練習問題については少し待っていただけるとありがたい限りです。


コメント