こんにちは。Horyです。
今回の記事では円運動の運動方程式について簡単にかいせつしようと思います。
高校物理における円運動の説明は中々にひどいと個人的には考えているのでそこら辺も含めて記事で解説しようと思います。
今回も頑張りましょう。
運動方程式の極座標変換
最初に、運動方程式の極座標変換についてです。
前回の記事で運動方程式は直交座標でも極座標でも描くことができると説明し、運動方程式を動径方向と接線方向で極座標表示しました。
上の式のようになる証明は前回の記事に詳しく書きましたので今回は行いません。
上の極座標表示の運動方程式が円運動の場合でどうなるかを考えます(もちろん、円運動の運動方程式は直交座標でも表示できるが・・・)
円運動の運動方程式 (極座標表示)
円運動の運動方程式ですが、運動が円周に拘束されるので動径距離がrで一定値を取ります。
このarというのが動径方向の加速度と呼ばれているもので、拘束条件の1つです。
拘束条件についてはこちらの記事にまとめているのでよく見といてください。
余談;角運動量保存則
高校物理の範囲外になりますが、角運動量保存則について解説します。
先ほどの極座標表示の運動方程式で接線方向の力が働かない場合を考えると・・・
上の式が一定値を取ることを角運動量保存則と言います。
円運動とは・・・
物体の運動が円周に拘束されることを円運動といいます。
円運動の位置座標・運動方程式は基本的には極座標により表しますが、別に直交座標で表すことも可能です。
また、円運動を静止極座標(慣性系)で表すか、回転極座標(非慣性系)で表すかでも考え方は変わります。
今回の記事では以下のことについて解説します。
- 円運動;直交座標と極座標
- 円運動;静止極座標と回転極座標
慣性系と非慣性系についてはこちらの記事に書かれていますので読んでおいてください。
また、私の書く記事では特段、断りがなければ静止座標系(慣性系)を用いています(そもそも、非慣性系を設定するメリットはあまりない)。
上の運動方程式も静止座標系(慣性系)です。
円運動;直交座標と極座標
円運動の運動方程式を実際に立ててみます。以下に条件を設定します。

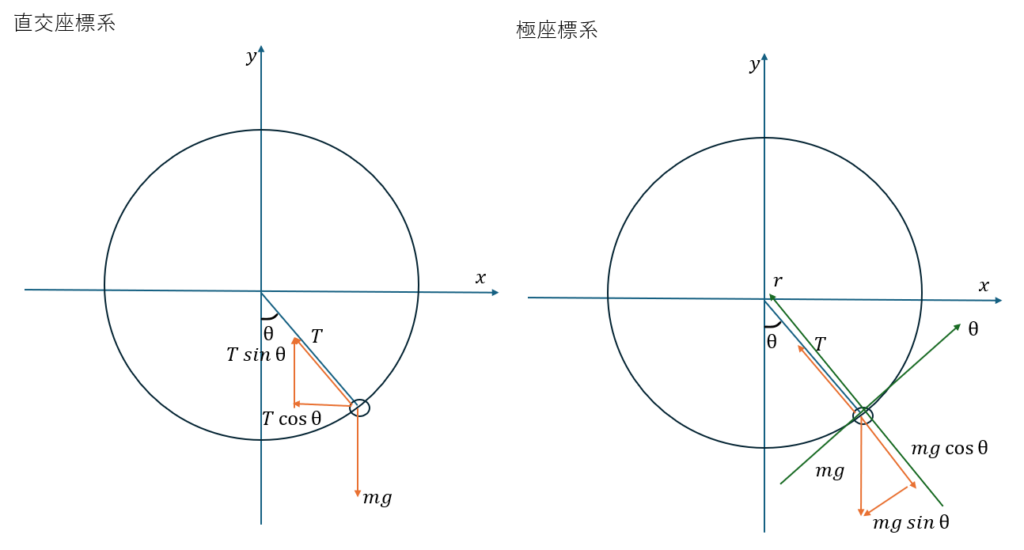
上の図で力は全て大きさで表示しています(スカラー表示)。
物体が円軌道しているので物体の座標は以下のように記述できます。
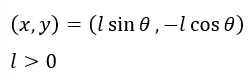
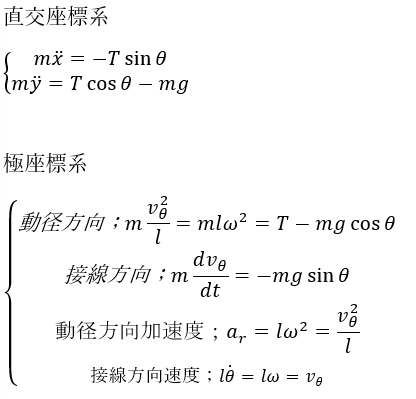
運動方程式を直交座標系と極座標系で記述します。
円運動;静止極座標と回転極座標
円運動について、静止極座標と回転極座標で運動方程式を立てます。
問題は先ほどと同じ条件にします。
また、極座標と言うことを忘れないでください。直交座標ではありません。
基本的に円運動で極座標を立てるときは、動径方向の加速度は中心方向の拘束条件なので、座標軸は以下のように取ってください
- 動径方向・・・円の中心に向かう方向を正
- 接線方向・・・物体が進む方向を正(速度の向き)
静止極座標
先ほどの問題で静止極座標(慣性系)で運動方程式を立てると以下のようになります。
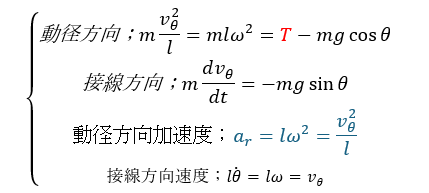
上の式における張力Tは向心力(円の中心に向かう力)と呼ばれるモノです。
また、青字で書いた部分は拘束条件です。
回転極座標
円運動の運動方程式を回転極座標系で立てるとはどういうことかというと、自分が円運動している物体の上に乗った時に物体はどのように運動しているかと言うことです。
当然ですが、自分も物体と一体となって円運動しているので物体は静止しているかのように見えます。
座標軸をX軸とY軸として以下のように取ります(右の図)。
座標軸そのものも物体と一体で円運動します。つまり、物体が常に原点に留まるような運動方程式を立てなければなりません。
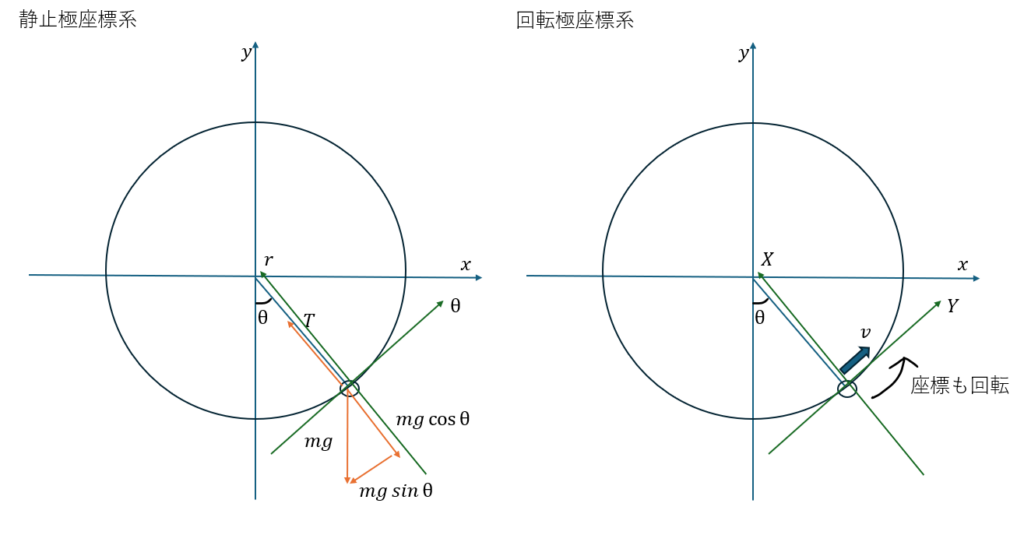
上の緑字で書いた部分は円運動における慣性力で、遠心力とよばれているものです。
遠心力という力は実際にはないです。これは非慣性系で辻褄あわせのために便宜的に導入する力でしかありません。
高校物理ではこれに関する説明をしっかりとしないので多くの生徒が遠心力という実際にはアリもしないような力があると誤解している現象が散見されます。
私が、高校物理はひどいと思っていることの1つです。
まとめ・・・
結局、円運動の運動方程式を書くときに極座標・直交座標・慣性系・非慣性系のどれでやれば良いの?と思います。
私は基本的に円運動の運動方程式を記述するときは静止座標系(慣性極座標)で運動方程式を記述します。
なぜなら、極座標で記述した方が物体の位置の変数がθ(偏角)だけになって楽だからです。
回転極座標系(非慣性極座標)はお勧めしません。
何故なら、遠心力という実際にはない力を便宜的に導入したくないですし、僕は遠心力という言葉を多用したくないからです。

コメント